Das ist ein Arduino Mega 2560 und der Aufbau ist vermutlich wie RAMPS, ein beliebter Aufsatz für Arduino für 3D Drucker, verkabelt. Sehr schön, damit kommt man klar. Frage den Verkäufer mal, ob er Dir sein Config.h File oder am besten gleich das ganze Verzeichnis schickt, dann bist Du ruckzuck im Geschäft. An der Sub-D Buchse werden einfach die Motoren angeschlossen sein, das wirst Du direkt sehen. Die Kabel, die im vorletzten Bild nach rechts oben weggehen, sind bestimmt die Motorkabel. Die vier Tasten sind die der einfachen Handbox. Die Handbox mit Display ist netter, aber die einfache Handbox kann auch alles und dem Bild nach hast Du ein Bluetooth Modul und kannst die Montierung über eine App vom Handy aus steuern.
Was war Dein Gedanke bei einem Motor mit 200 Schritten pro Umdrehung mit einem 20.25:1 Getriebe was danach noch mit 47:24 untersetzt wird? Das sind ja schon 7931.25 Vollschritte pro Umdrehung! Aber ok, die Auflösung ist mehr als genug.
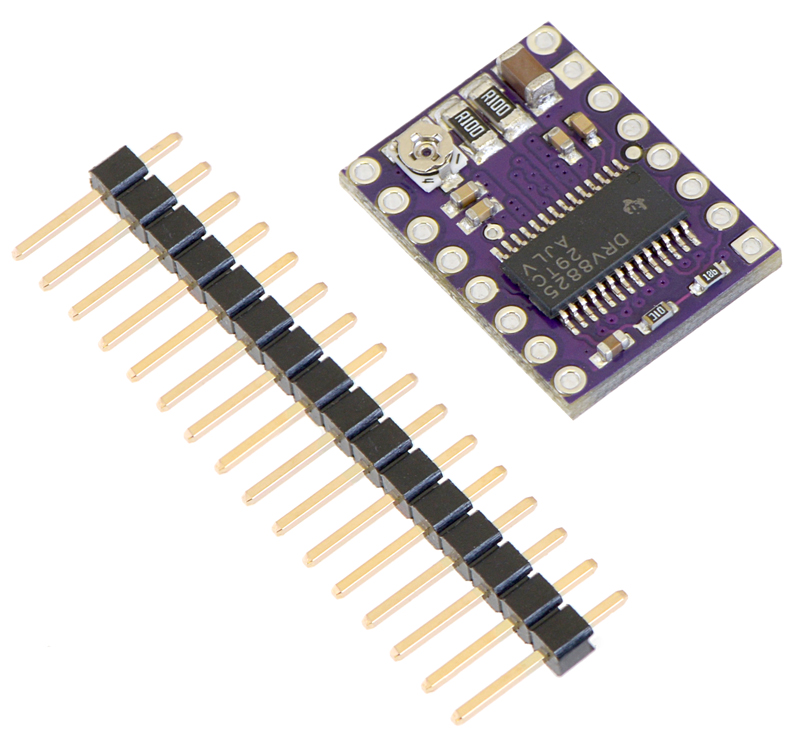
Die Treiber sehen nach denen hier aus:
This breakout board for TI’s DRV8825 microstepping bipolar stepper motor driver features adjustable current limiting, over-current and over-temperature protection, and six microstep resolutions (down to 1/32-step). It operates from 8.2 V to 45 V and can deliver up to approximately 1.5 A per...

www.pololu.com
M0, M1 und M2 konfigurieren die Mikroschritte und auf dem Bild sieht es so aus, als ob die wirklich zum Controller gingen, was bei RAMPS nicht so ist. Eine sinnvolle visuelle Konfiguration wären 2 Mikroschritte (Halbschritte). Das muss in der Config.h Datei eingestellt werden. Ich sehe gerade in OnStep/src/sd_drivers/Models.h, dass OnStep das tatsächlich steuern kann.
Motor 200 Schritte, 2 Mikroschritte
Untersetzung 20.5:1 und 47/24 mit Zahnrädern
Schneckenrad 180 Zähne
200 * 2 * 20.25 * 47 / 24 = 15862.5 Schritte pro Umdrehung der Schneckenwelle (AXIS?_STEPS_PER_WORMROT)
15862.5 * 180 / 360 = 7931.25 Schritte pro Grad (AXIS?_STEPS_PER_DEGREE)
7931.25/3600 = 2.2 Schritte pro Bogensekunde Auflösung
360/180 = 2.0 Grad pro Umdrehung
86400 * (1-1/365.25) / 180 = 478.7 Sekunden RA-Nachführungsperiode
15862.5 / 478.7 = 33.1 Hz Nachführungsfrequenz
Damit schaffst Du so eben 2,5 Grad/s beim Goto, das ist schon angenehm. Fotografisch würde ich 1/4 Schritte nehmen, das bringt mehr Auflösung und Ruhe, aber nur halb so schnelles goto.
Das ist schon ein schönes Setup!
Weisst Du, wieviel Strom Deine Motoren abkönnen? Den Strom muss man mit den kleinen Potis auf den Treibern einstellen. Vielleicht kann der Verkäufer Dir sagen, wieviel Strom seine Motoren vertragen, damit Du weisst, ob Du das neu einstellen musst. Generell sollten die Motoren bei einer Montierung nur handwarm werden.
Michael

") Es ist also nicht mit berechnet, aber ein Getriebe ändert natürlich viel.
Es ist also nicht mit berechnet, aber ein Getriebe ändert natürlich viel.