AstroFun
Aktives Mitglied
Hallo, ich bin Christian, neu hier und möchte mich kurz vorstellen.
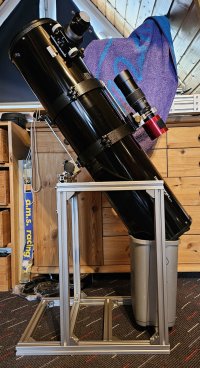
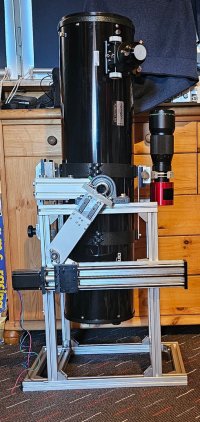
Zuerst einmal viele Grüße an das Forum. Ich werde voraussichtlich Anfang 2025 in den (hoffentlich) wohlverdienten Ruhestand gehen und suche ein interessantes Hobby für die Zeit nach dem langen Schaffen. Ein Freund hatte mich mit seiner Leidenschaft für die Astronomie angesteckt und nach kurzem Überlegen habe ich von Ihm ein Omegon ProNewton N 203 /1000 OTA übernommen, allerdings ohne Montierung.
Im Bereich Astronomie bin ich Neuling, habe aber etwas Erfahrung mit Optik und war beruflich als Physiker in den letzten Jahren mit der optischen Spektroskopie an Halbleiter-Nanostrukturen unterwegs. Ein Mikroskop und Teleskop haben natürlich erhebliche Unterschiede und die Objekte wandern bei der Mikroskopie auch nicht aus dem Bild, aber vom ersten Eindruck her ist die Herangehensweise teilweise ähnlich.
Neben den Sternen interessiert mich auch die Technologie, einmal optisch/mechanisch aber auch die Software-Seite. Durch kleinere Selbstbau-CNC-Fräsen kenne ich mich ein wenig mit der Motorisierung und Ansteuerung von Schrittmotoren aus und beruflich habe ich unter anderem ZWO-Astro-Kameras mit Python angesteuert und ausgelesen.
Parallel zum Lesen soll der erste Schritt der Bau einer Montierung für das ProNewton werden. Dazu werde ich noch viel Lernen müssen. Dann Aspekte wie das Guiden und die Bildbearbeitung. Später eventuell noch Spektroskopie, dafür hätte ich noch alte Monochromator-Fragmente rumliegen.
Zuerst einmal viele Grüße an das Forum. Ich werde voraussichtlich Anfang 2025 in den (hoffentlich) wohlverdienten Ruhestand gehen und suche ein interessantes Hobby für die Zeit nach dem langen Schaffen. Ein Freund hatte mich mit seiner Leidenschaft für die Astronomie angesteckt und nach kurzem Überlegen habe ich von Ihm ein Omegon ProNewton N 203 /1000 OTA übernommen, allerdings ohne Montierung.
Im Bereich Astronomie bin ich Neuling, habe aber etwas Erfahrung mit Optik und war beruflich als Physiker in den letzten Jahren mit der optischen Spektroskopie an Halbleiter-Nanostrukturen unterwegs. Ein Mikroskop und Teleskop haben natürlich erhebliche Unterschiede und die Objekte wandern bei der Mikroskopie auch nicht aus dem Bild, aber vom ersten Eindruck her ist die Herangehensweise teilweise ähnlich.
Neben den Sternen interessiert mich auch die Technologie, einmal optisch/mechanisch aber auch die Software-Seite. Durch kleinere Selbstbau-CNC-Fräsen kenne ich mich ein wenig mit der Motorisierung und Ansteuerung von Schrittmotoren aus und beruflich habe ich unter anderem ZWO-Astro-Kameras mit Python angesteuert und ausgelesen.
Parallel zum Lesen soll der erste Schritt der Bau einer Montierung für das ProNewton werden. Dazu werde ich noch viel Lernen müssen. Dann Aspekte wie das Guiden und die Bildbearbeitung. Später eventuell noch Spektroskopie, dafür hätte ich noch alte Monochromator-Fragmente rumliegen.

")