AstroFun
Aktives Mitglied
Hallo,
nachdem die DIY-Montierung für ein Omegon ProNewton N 203 /1000 OTA soweit fertig ist
(Projekt: Selbstbau einer Dobson-ähnlichen Montierung aus Alu-Profilen) , geht es jetzt an die Software.
Ich programmiere gerne, von daher soll die Steuerung in Python selbstgeschrieben werden. Als Steuerrechner ist ein 8 Jahre altes Notebook mit Windows 11 im Einsatz.
Die Montierung ist eine azimutale Montierung angesteuert über Schrittmotoren. Dabei ist die horizontale Bewegung konventionell angetrieben durch einen Schrittmotor mit einem 10:1 Planetengetriebe. Der Motor treibt eine Riemenscheibe mit 14 Zähnen, die in einen umgekehrten Zahnriemen (368 Zähne ) auf einem Axiallager (300 mm Durchmesser) eingreift.
Die vertikale Bewegung ist etwas speziell. Hier treibt ein Schrittmotor einen CNC-Linearantrieb, der über einen Hebel das Teleskop dreht. Die Länge des Hebels passt sich über 2 parallele Linearführungen an.
Das ganze funktioniert recht gut und reproduzierbar. Ein Schritt der Schrittmotoren soll rechnerisch weniger als eine Bogensekunde und damit weniger als die Breite eines Pixels auf der Kamera betragen.
Die Steuerung der Schrittmotoren erfolgt über den für 3D-Drucker üblichen G-Code, mit einem Arduino UNO als G-Code Interpreter. Die Software auf dem Arduino ist Grbl v1.1 (GitHub - grbl/grbl: An open source, embedded, high performance g-code-parser and CNC milling controller written in optimized C that will run on a straight Arduino). Der Arduino steuert 2 Schrittmotor-Treiber DM556 an.
Da ich portable Installationen mag, ist als Python-Interpreter WinPython installiert (WinPython). Die IDE ist Spyder. Andere Python-Umgebungen gehen sicherlich auch, allerdings ist die Formatierung der GUI-Elemente dann gerne verändert.
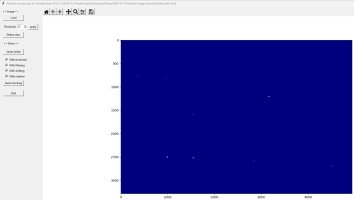
Die GUI ist mit tkinter geschrieben, das ist in Python integriert und mir reichen die Möglichkeiten.
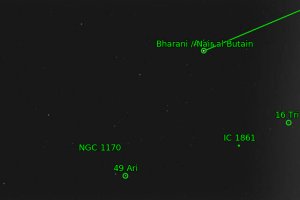
Der G-Code für die Schrittmotoren lässt sich mit Python einfach erzeugen und an den Arduino senden. Aktuell ist die Menü-Oberfläche und die Ansteuerung für ein einfaches GoTo fertig.
nachdem die DIY-Montierung für ein Omegon ProNewton N 203 /1000 OTA soweit fertig ist
(Projekt: Selbstbau einer Dobson-ähnlichen Montierung aus Alu-Profilen) , geht es jetzt an die Software.
Ich programmiere gerne, von daher soll die Steuerung in Python selbstgeschrieben werden. Als Steuerrechner ist ein 8 Jahre altes Notebook mit Windows 11 im Einsatz.
Die Montierung ist eine azimutale Montierung angesteuert über Schrittmotoren. Dabei ist die horizontale Bewegung konventionell angetrieben durch einen Schrittmotor mit einem 10:1 Planetengetriebe. Der Motor treibt eine Riemenscheibe mit 14 Zähnen, die in einen umgekehrten Zahnriemen (368 Zähne ) auf einem Axiallager (300 mm Durchmesser) eingreift.
Die vertikale Bewegung ist etwas speziell. Hier treibt ein Schrittmotor einen CNC-Linearantrieb, der über einen Hebel das Teleskop dreht. Die Länge des Hebels passt sich über 2 parallele Linearführungen an.
Das ganze funktioniert recht gut und reproduzierbar. Ein Schritt der Schrittmotoren soll rechnerisch weniger als eine Bogensekunde und damit weniger als die Breite eines Pixels auf der Kamera betragen.
Die Steuerung der Schrittmotoren erfolgt über den für 3D-Drucker üblichen G-Code, mit einem Arduino UNO als G-Code Interpreter. Die Software auf dem Arduino ist Grbl v1.1 (GitHub - grbl/grbl: An open source, embedded, high performance g-code-parser and CNC milling controller written in optimized C that will run on a straight Arduino). Der Arduino steuert 2 Schrittmotor-Treiber DM556 an.
Da ich portable Installationen mag, ist als Python-Interpreter WinPython installiert (WinPython). Die IDE ist Spyder. Andere Python-Umgebungen gehen sicherlich auch, allerdings ist die Formatierung der GUI-Elemente dann gerne verändert.
Die GUI ist mit tkinter geschrieben, das ist in Python integriert und mir reichen die Möglichkeiten.
Der G-Code für die Schrittmotoren lässt sich mit Python einfach erzeugen und an den Arduino senden. Aktuell ist die Menü-Oberfläche und die Ansteuerung für ein einfaches GoTo fertig.