chris1986
Mitglied
Hallo,
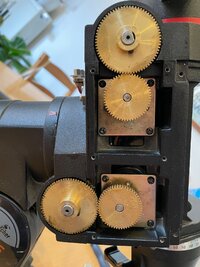
Ich habe als ‚Kellerfund‘ neulich eine alte HEQ5-Montierung erhalten und wollte mal in die Runde fragen, ob hierfür jemand eine passende Lösung mit OnStep zusammengebastelt hat. Die Upgrade-Lösung von Skywatcher ist natürlich optimal aber für 500€ etwas happig.
Ich habe mich durch das OnStep Wiki gearbeitet und gemerkt, dass eine eigene Lösung mit ein wenig Trial and Error verbunden ist. Wenn ich nun aber in Microcontroller, Shield, Motorrreiber und Stepper investiere, würde ich ungern doppelt ordern (dann kann ich nämlich gleich das offizielle Upgrade kaufen).
Zusätzlich wundere ich mich, ob alle erweiterten Commands über die OnStep Software verfügbar sind: Ich habe mit einer anderen Montierung die ISS über SkyTrack verfolgen können…jedoch nur über die SynScan Treiber. EQmod hatte in diesem Fall Commands wie variable slew speed nicht unterstützt.
Die Frage wäre also, ob OnStep ähnliche Restriktionen hat oder potentiell sämtliche synscan Funktionen beinhaltet?
Für Hinweise von Bastlern, die Erfahrung mit den Upgrade der alten HEQ5 haben wäre ich dankbar.
Christian
Ich habe als ‚Kellerfund‘ neulich eine alte HEQ5-Montierung erhalten und wollte mal in die Runde fragen, ob hierfür jemand eine passende Lösung mit OnStep zusammengebastelt hat. Die Upgrade-Lösung von Skywatcher ist natürlich optimal aber für 500€ etwas happig.
Ich habe mich durch das OnStep Wiki gearbeitet und gemerkt, dass eine eigene Lösung mit ein wenig Trial and Error verbunden ist. Wenn ich nun aber in Microcontroller, Shield, Motorrreiber und Stepper investiere, würde ich ungern doppelt ordern (dann kann ich nämlich gleich das offizielle Upgrade kaufen).
Zusätzlich wundere ich mich, ob alle erweiterten Commands über die OnStep Software verfügbar sind: Ich habe mit einer anderen Montierung die ISS über SkyTrack verfolgen können…jedoch nur über die SynScan Treiber. EQmod hatte in diesem Fall Commands wie variable slew speed nicht unterstützt.
Die Frage wäre also, ob OnStep ähnliche Restriktionen hat oder potentiell sämtliche synscan Funktionen beinhaltet?
Für Hinweise von Bastlern, die Erfahrung mit den Upgrade der alten HEQ5 haben wäre ich dankbar.
Christian
")