Ehemaliges Mitglied
Moin moin,
neues Konzept, ich muss nochmal Geld in die Hand nehmen denn die Motorisierung mit den Bürstenmotoren haut nicht hin. ich bräuchte da schon eine Untersetzung von mindestens 50:1 damit die Motoren auch gesichert anlaufen können und nicht übertreiben schnell laufen.
Ich hab mir deswegen gestern in der Bucht Nema 17 mit 27:1 Planetengetriebe bestellt und hoffe das ich mich da nicht verhauen habe denn ich will natürlich immer noch auch in der Lage sein flotte Schwenks zu machen.
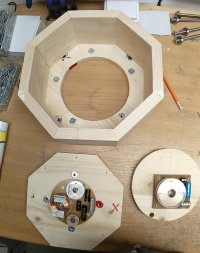
Nach Erkenntnis das ich den Bürstenantrieb sterben lassen muss hab ich mich der Dobson Plattform zugewandt um sie endlich im Finale fertig zu stellen.
Das Ergebnis sieht wie folgt aus.


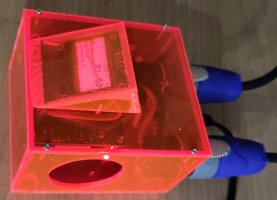
Die Steuerung basierend auf dem Adurion mit eigener Hauptplatine.

Und weil ich mir gerne den Rücken frei halte noch eine Ergänzung um Flexibel zu sein


Mein Stepper ( so habe ich es ermittelt) braucht ein Delay von 462 Microsekunden um die Erddrehung bei dem gegeben Untersetzungsverhältnis auszugleichen, ich hab das ganze jetzt so eingerichtet das ich dem Stepper 400 vorgebe und mit dem Poti ein Variables Delay geschaffen habe das mir links und rechts von den 462 Microsekunden noch Platz lässt zum Spielen.
Der kleine Schalter ermöglicht mir den Antreibe Komplett zu Disabeln.
Steht das Poti in der Mitte dann umgehe ich die Abfrage zum Mapping und setzte den delay von 462 Direkt wobei die Grüne LED mir signalisiert das ich den ermittelten Wert fahre, die Roten LED´s signalisieren mir Schneller oder Langsamer.
Die richtigen Einstellwerte muss ich nochmal gegentesten, es kann sein das ich da viel zu viel Spielraum gelassen habe was unnötig wäre. aber so hab ich schonmal die Möglichkeit den Objekt jetzt schneller voraus zulaufen oder verzögert hinterher zu rennen.
Jetzt ist erst nochmal die Mirow Box mein Ziel, ich will das Gegengewicht anderst Platziert haben nur dazu muss ich innen erst mal wieder alles ausbauen.
Neues Konzept zur Motorisierung meines Teleskopes
CS
Werner
neues Konzept, ich muss nochmal Geld in die Hand nehmen denn die Motorisierung mit den Bürstenmotoren haut nicht hin. ich bräuchte da schon eine Untersetzung von mindestens 50:1 damit die Motoren auch gesichert anlaufen können und nicht übertreiben schnell laufen.
Ich hab mir deswegen gestern in der Bucht Nema 17 mit 27:1 Planetengetriebe bestellt und hoffe das ich mich da nicht verhauen habe denn ich will natürlich immer noch auch in der Lage sein flotte Schwenks zu machen.
Nach Erkenntnis das ich den Bürstenantrieb sterben lassen muss hab ich mich der Dobson Plattform zugewandt um sie endlich im Finale fertig zu stellen.
Das Ergebnis sieht wie folgt aus.
Die Steuerung basierend auf dem Adurion mit eigener Hauptplatine.
Und weil ich mir gerne den Rücken frei halte noch eine Ergänzung um Flexibel zu sein
Mein Stepper ( so habe ich es ermittelt) braucht ein Delay von 462 Microsekunden um die Erddrehung bei dem gegeben Untersetzungsverhältnis auszugleichen, ich hab das ganze jetzt so eingerichtet das ich dem Stepper 400 vorgebe und mit dem Poti ein Variables Delay geschaffen habe das mir links und rechts von den 462 Microsekunden noch Platz lässt zum Spielen.
Der kleine Schalter ermöglicht mir den Antreibe Komplett zu Disabeln.
Steht das Poti in der Mitte dann umgehe ich die Abfrage zum Mapping und setzte den delay von 462 Direkt wobei die Grüne LED mir signalisiert das ich den ermittelten Wert fahre, die Roten LED´s signalisieren mir Schneller oder Langsamer.
Die richtigen Einstellwerte muss ich nochmal gegentesten, es kann sein das ich da viel zu viel Spielraum gelassen habe was unnötig wäre. aber so hab ich schonmal die Möglichkeit den Objekt jetzt schneller voraus zulaufen oder verzögert hinterher zu rennen.
Jetzt ist erst nochmal die Mirow Box mein Ziel, ich will das Gegengewicht anderst Platziert haben nur dazu muss ich innen erst mal wieder alles ausbauen.
Neues Konzept zur Motorisierung meines Teleskopes
CS
Werner
Zuletzt von einem Moderator bearbeitet:
")